How to Directly Drive x.27 or x.40 Stepper Motors
Caution
This tutorial is obsolete. See the updated documentation to learn how to use stepper motors with MobiFlight.
For this tutorial, you need the following components
- MobiFlight Connector
- MobiFlight Compatible Arduino with the newest MobiFlight Firmware
- x27 Stepper (Singleshaft) and/or x40 (DoubleShaft) Stepper
- Soldering Iron, Soldering tin, wires
Connect the wires to consecutive pins in your Arduino:

Go to "MobiFlight Modules"
Add a new device (Stepper Motor), then configure the pins, so that Pin 2 and Pin 3 are swapped:

It is important to have these two pins swapped otherwise the stepper will just buzz around angrily.
Under "Output" create a row, and name it what you'd like. Don't forget to check the active box.
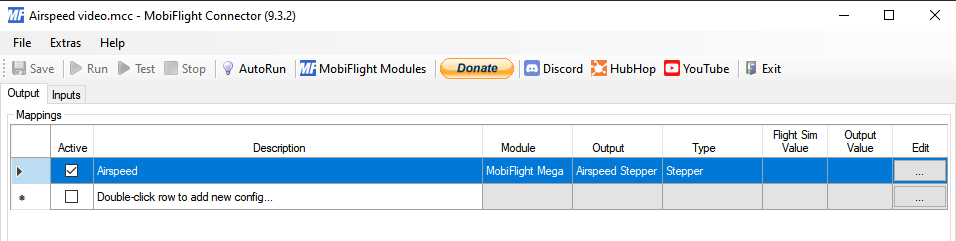
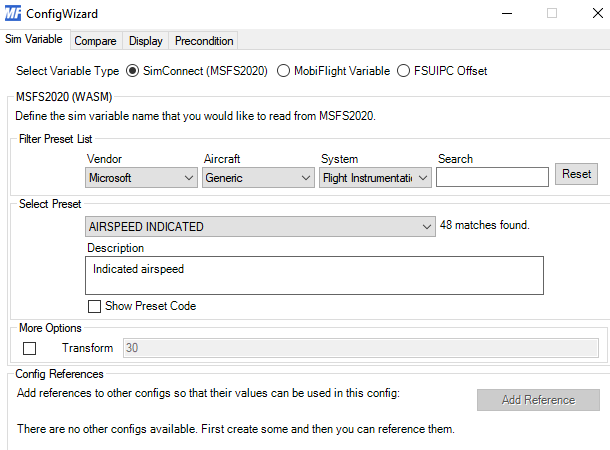
Configure the stepper to whatever you'd like.
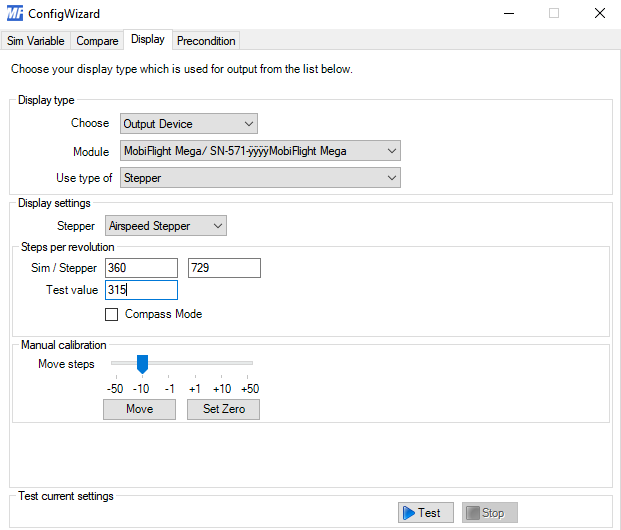
Under display, choose your stepper and insert your sim/stepper value. For me I found moving the stepper 729 steps gives 360 degrees of motion. The stepper has 315 degrees maximum so I set this as the test value.
This was written by Captain Bob with help from Discord Members @Ralf (elral66), @Tuomas Kuosmanen (tigertfly), @Jaime Leon and @John Toroid Thank you so much for helping me get it to work!
- MobiFlight Connector Installation
- Mobiflight Connector BETA version installation
- Modules
- MobiFlight Connector Files Structure
- MobiFlight Connector Uninstall
- Modules Reset to factory default
- Verifying the WASM module installation and locating the MSFS2020 community folder
- Verifying the WASM module installation and locating the MSFS2024 community folder
- Using a Winwing FCU with MobiFlight
- Using VKB controllers with MobiFlight
- Providing logs from MobiFlight
- MobiFlight Connector How does it work
- Mobiflight Connector Main Window
- Flash module with MobiFlight firmware
- Input and Output devices
- Joysticks
- Midi Boards
- Sim Variables (for Output)
- Input Actions
- Merging configuration files
- Disabling specific COM ports
- Examples Output LEDs
- Examples Input Switch
- Example 7 segment display
- Example Servo motor
- Controlling LEDs with an output shift register
- Adding lots of buttons with an input shift register
- Beginner's guide to input multiplexers
- Key Matrix with standard MobiFlight and Multiplexers
- Tutorial Easy Driver and x.27 or x.40 Stepper Motor
- Tutorial for Airbus VS display via 7-Segment LED Module
- Example Analog Input Potentiometer
- Baron G58 Tutorial Gear, Flaps, Mags, ELT Input Output Programming
- Using Mobiflight to control arduino-based 3rd party panels (RealSimGear GNS530)
- How to use a VNH2SP30 DC motor shield with MobiFlight
- Using 3D printer mainboards
- Playing sounds by sending keystrokes to AutoHotKey
- Using the selector knob on a Honeycomb Bravo
- Using an adjustable 12 position switch as a GA starter
- Brightness of LCD displays with I2C
- Using three-position switches
- Transponder with one Rotary
- Workflow for Creating Flight Simulation Panels ‐ Part 1
- MSFS2020 RPN Tips and Tricks
- MSFS2020 Using the Custom Input Code Box
- MSFS2020 Install WASM module and Event List
- MSFS2020 How to Create and Use User Defined Lvars
- MSFS2020 How to Create a Blinking LED configuration
- MSFS2020 User Defined WASM Module Events Best Practices
- MSFS2020 Developer Mode, Model Behavior dialog and Console window
- MSFS2020 PMDG 737‐700 List of Events that require use of FSUIPC7
-
MSFS2020 PMDG 737‐700 Calibrate throttle idle and reverse thrust using interpolation (Valkyrie)
- MSFS2020 PMDG 737-700 Chrono unit functions implemented in Mobiflight
- Configuring PMDG 737 Parking Brake Lever Auto-Release with a Servo in Mobiflight
- Using encoder to drive a value back and forth within a given range
- Adding a custom board to MobiFlight
- User guide - Community Board and Custom Devices
- Developing your own custom devices/boards