![]()
ROS 2 package suite of CRANE-X7.

- CRANE-X7
- Linux OS
- Ubuntu 24.04
- ROS
# Download crane_x7 repositories
$ mkdir -p ~/ros2_ws/src
$ cd ~/ros2_ws/src
$ git clone -b $ROS_DISTRO /~https://github.com/rt-net/crane_x7_ros.git
$ git clone -b $ROS_DISTRO /~https://github.com/rt-net/crane_x7_description.git
# Install dependencies
$ rosdep install -r -y -i --from-paths .
# Build & Install
$ cd ~/ros2_ws
$ colcon build --symlink-install
$ source ~/ros2_ws/install/setup.bash# Connect CRANE-X7 to PC, then
$ source ~/ros2_ws/install/setup.bash
$ ros2 launch crane_x7_examples demo.launch.py port_name:=/dev/ttyUSB0
# Terminal 2
$ source ~/ros2_ws/install/setup.bash
$ ros2 launch crane_x7_examples example.launch.py example:='gripper_control'
# Press [Ctrl-c] to terminate.Please refer to crane_x7_examples for details.
- crane_x7_control
- README
- This package includes a hardware driver for CRANE-X7.
- crane_x7_examples
- README
- This package includes example codes for CRANE-X7.
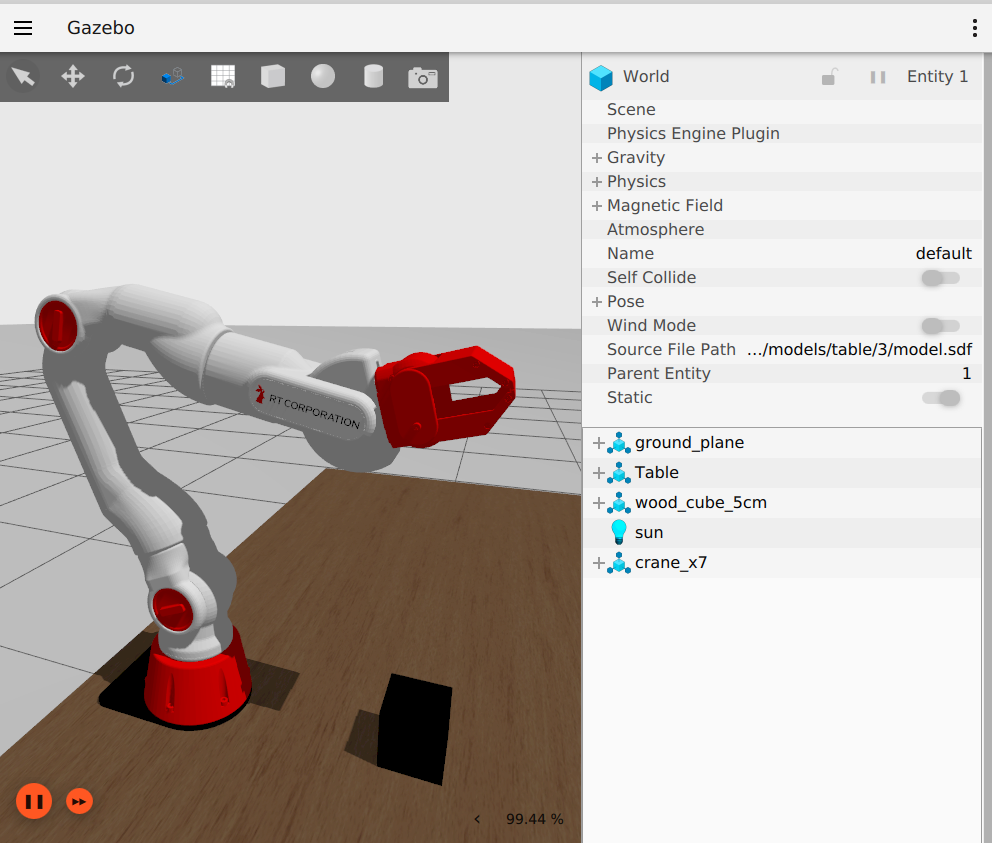
- crane_x7_gazebo
- README
- This package includes Gazebo simulation environments for CRANE-X7.
- crane_x7_moveit_config
- README
- This package includes configuration files for
moveit2.
- crane_x7_description (external package)
- README
- This package includes a model data (xacro) of CRANE-X7.
(C) 2018 RT Corporation <support@rt-net.jp>
This repository is licensed under the Apache License, Version 2.0, see LICENSE.
Unless attributed otherwise, everything in this repository is under the Apache License, Version 2.0.
The crane_x7_ros depends on crane_x7_description package. The RT Corporation's NON-COMMERCIAL LICENSE applies to the package.